PEEK 谐波减速器
人形机器人关键模组
这是一个天才的设计,它名为谐波减速器,是一种能将高速低扭矩输入转化为低速高扭矩输出的精密装置。
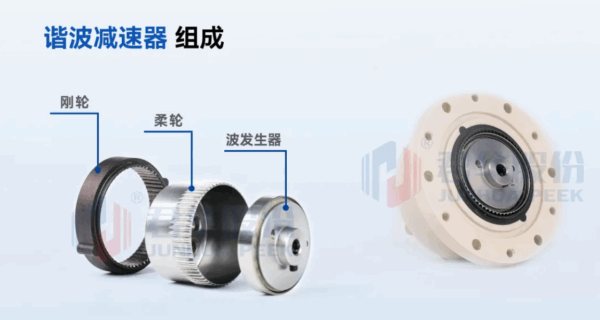
谐波减速器主要由三部分组成:
左边:外部的刚轮,为带内齿的刚性环。
中间:柔轮,为可弹性形变的薄壁外齿齿轮,通常比钢轮少两齿。
右边:波发生器,呈椭圆形并配有滚珠轴承。
它在人形机器人关节中如何发挥作用?
其核心技术壁垒又在哪里?
运行原理
当波发生器装入柔轮内部,柔轮被挤压成椭圆形,使其外齿与刚轮内齿在椭圆长轴两端啮合,在短轴处完全脱开。随着波发生器转动,柔轮产生周期性径向形变。由于柔轮齿数少两齿,二者产生相对运动,波发生器顺时针转180°,柔轮相对钢轮逆时针移动一齿;波发生器转一整圈,柔轮移动两齿,从而实现高减速比与扭矩放大。且由于谐波减速器结构紧凑,因而在人形机器人中获得广泛应用。
技术核心壁垒
柔轮在极微小尺度内承受频繁弹性变形,要求材料兼具高弹性极限与高抗疲劳强度,必须选用特殊钢材并严格控制杂质。热处理的时间与温度也需精准控制,以获取高韧性、高强度。
钢轮在与柔轮啮合过程中,自身几乎不发生弹性变形,从而将波发生器引入的形变完全传递至柔轮,确保精确的齿间运动。这就要求材料兼具高刚性与耐磨性。
PEEK5600CF30材料具有高模量、低摩擦系数及低磨损等特性。
采用PEEK5600CF30的钢轮与钢材的柔轮啮合时,可在保证传动精度的同时,实现系统减重、提升耐磨性及降低运行噪音的综合优势。
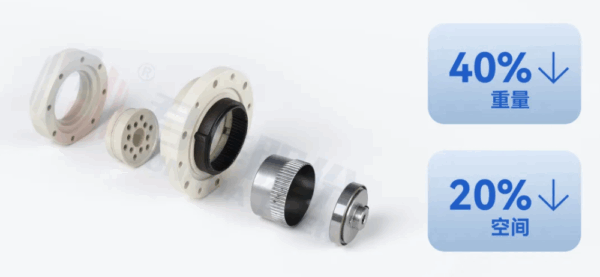
此外,人形机器人的谐波减速机组件也可以使用PEEK进行制造,可以达到减重40%,压缩空间20%。减重可以提高人形机器人的有效负载,延长电池续航时间。
齿形设计则决定减速器的精度、寿命、刚度及传动效率,优秀齿形能保证啮合连续平稳、无间隙,将传动误差降至最低。
生产中,柔轮与波发生器需达微米级精度,依赖高精度五轴机床、车齿机及专用刀具,且设备昂贵,对操作人员有高技术需求。量产还需材料性能稳定、加工与装配流程可靠、检测体系完善且可追溯,并进行严格的成本核算,才能实现低成本批量生产。

展望未来
人形机器人行业正快速发展,呈现爆发式增长。国内外众多企业积极投入,产业链加速成熟。作为机器人关节的核心零部件,谐波减速器也迎来快速增长机遇。
目前主流人形机器人使用数量如何?以国外人形机器人为例,其全身28个旋转执行器中,14个采用谐波减速器。国内机器人平均使用3-6个,未来PEEK谐波减速器仍有很大提升空间。
展望未来全球市场需求:据东吴证券预测:2025年谐波减速器需求约为16万台,2026年达90万台,2027年增至600万台。至2030年,全球人形机器人销量预计达350万台,若平均每台使用10台谐波减速器,整体市场空间将超过4200万台。
作为PEEK材料领域的专业供应商,君华股份拥有完整的产业链生产能力,致力于为客户提供专业的PEEK在人形机器人领域的应用解决方案,全程配合客户需求,助力人形机器人轻量化及降本量产!